
【大河财立方 记者吴春波】近期,汉威科技公布了2024年度的财务报告。在董事长任红军写给全体股东的公开信中,他强调了公司计划增强对机器人传感器市场的拓展,并加快新技术的应用,以期提升业绩表现。
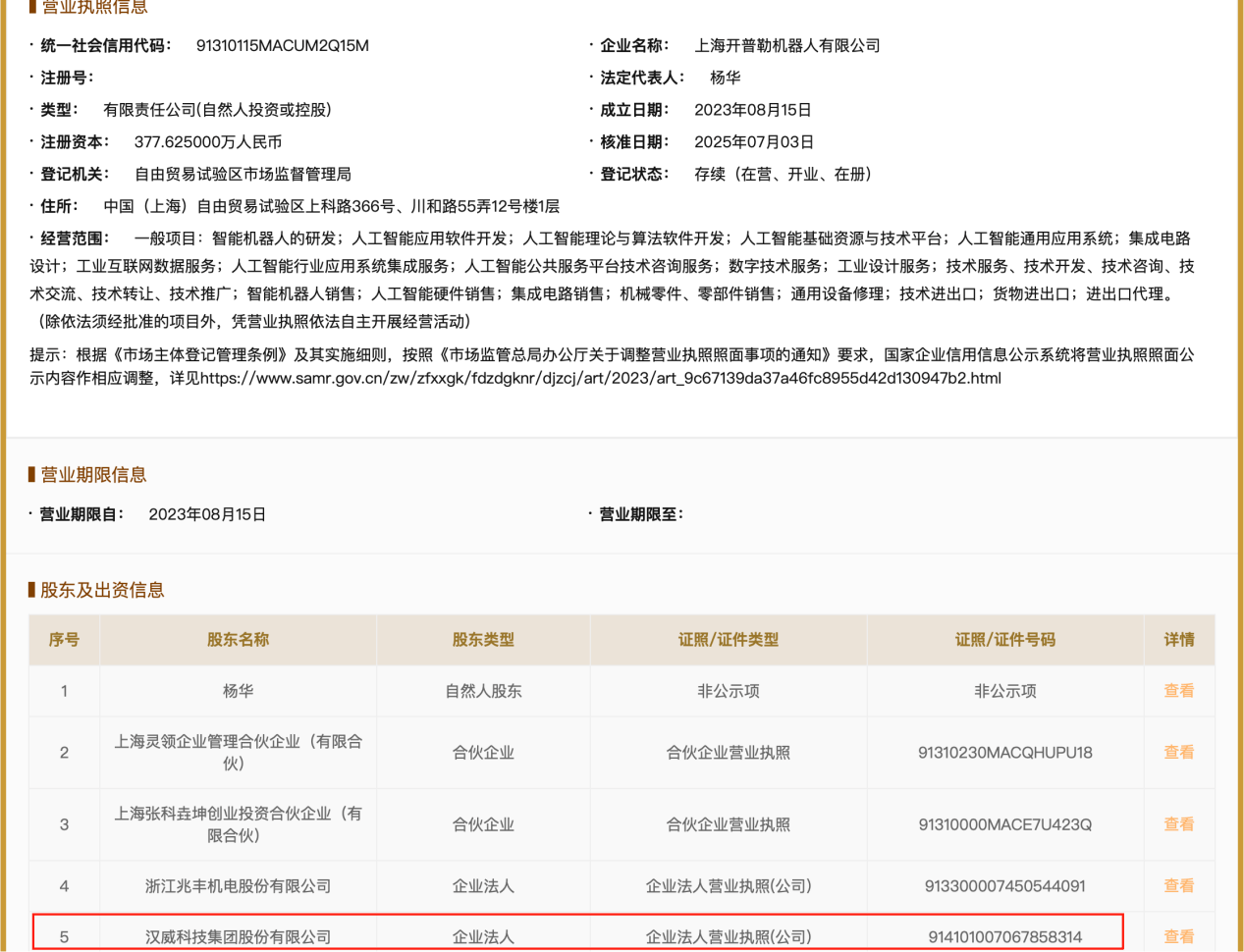
汉威科技将具身智能视为核心战略,其首个投资的人形机器人制造企业已显露出水面。据大河财立方记者于7月3日的报道,国家信用信息公示系统发布的核准信息表明,汉威科技已成为上海开普勒机器人有限公司(简称开普勒机器人)的股东之一。
战略投资开普勒,汉威科技布局具身智能再进一步
汉威科技作为气体传感器的领军企业以及综合型传感器解决方案的提供商,其产品线早已突破了气体传感器的界限,并且持续拓展至家电、车载以及具身智能等多个领域。
肖锋,汉威科技的高级副总裁兼董事会秘书,在介绍本次对开普勒的投资前指出,公司已在机器人领域进行了广泛布局,包括柔性触觉传感器、惯性测量单元、MEMS压力应变片、电子鼻等气味嗅觉传感器以及非制冷红外热成像模组等多种传感器产品。这些产品共同构成了一个涵盖“触觉、平衡、力控、嗅觉”等多个维度的产品系列。
这表明,在实体智能传感器的领域,汉威科技通过内部培育和外部收购的手段,已经打造了完善的技术创新架构以及稳固的产业根基。
汉威科技为何选择对下游的机器人企业进行投资?知情人士向大河财立方记者透露,在此次投资行动之前,汉威科技已经成立了具身智能传感器研究院,旨在整合创新资源,专注于人形机器人相关传感器的研发工作。此次投资行为,将使汉威科技能更准确地把握具身智能传感器的实际需求,从而加快创新步伐,研发出更多适用于具身智能的传感器产品。
开普勒机器人作为一家备受瞩目的投资对象,自2023年8月成立以来,其联合创始人胡德波曾供职于华为。尽管成立时间尚不足三年,这家企业已然崭露头角,成为工业人形机器人的研发与应用领域的佼佼者。
据消息透露,开普勒公司的人形机器人项目正朝着工业应用的方向发展,专注于满足企业在生产过程中的具体需求。该项目采纳了“技术驱动与需求引导”的双重策略,将工业应用场景作为主要的突破口。
值得注意的是,该公司研发的K2大黄蜂人形机器人,近期得到了全球人形机器人领域的领军企业Figure的CEO Brett Adcock的高度评价与推荐。
大河财立方记者观察到,双方的合作意向早已显现。在今年的6月9日,开普勒在其微信公众号上发布信息,宣布与汉威科技正式达成一项合作协议。根据这一协议,双方计划在具身智能人形机器人这一领域进行深入合作,将先进感知系统与智能执行技术相结合,旨在促进人形机器人在工业环境中的广泛应用。
开普勒机器人宣布,此次合作标志着双方共同进入工业自动化及具身智能领域的协同创新新阶段。
具身智能商业化加速,工业场景或将优先落地
公开信息表明,近两年来,无论是国内还是国外,众多科技公司和初创企业都纷纷加入了人形机器人的研发领域。特别在2024年,这一年更是见证了国内外人形机器人原型机的集中发布。
除了先前提及的K2大黄蜂,还有1XTech推出的NEOBeta型号、波士顿动力公司生产的电动版atlas机器人、优必选公司推出的WalkerS1型号、小鹏汽车公司推出的Iron系列、帕西尼感知科技公司推出的TORA-ONE型号、银河通用机器人公司推出的GalbotG1型号以及数字华夏公司推出的“夏澜”型号等。
在商业应用领域,鉴于工业生产环境具有明显的单一性和重复性特征,这使得人形机器人在此类场景下更容易实现实际应用,并且对于人形机器人的实训来说,也有助于获取高标准的训练数据。
胡德波,作为开普勒机器人的联合创始人兼首席执行官,明确指出,尽管人形机器人领域目前备受瞩目,然而构建商业价值的完整循环将成为未来发展的关键任务。同时,他强调,工业领域的应用是现阶段及未来一段时期内实现商业闭环的理想选择。
其详细阐述,目前主要存在两大领域适宜现阶段人形机器人进行探索,分别是仓储物流领域以及工业制造领域。仓储物流领域用工需求大,工作环境相对单一,且任务重复性高,非常适合机器人进行替代;而工业制造领域涵盖众多门类,目前人形机器人应当主要关注离散工业中的辅助性任务,以寻找发展机遇。
高盛发布的分析报告指出,人形机器人预计将在2024年至2027年间,首先在制造业领域得到广泛应用。
公开信息表明,特斯拉的Optimus、优必选的WalkerS以及乐聚的夸父人形机器人,目前已在汽车制造领域投入使用,它们主要承担着搬运和质检等需要重复进行的任务。
值得关注的是,由开普勒所研发的K2“大黄蜂”在工业应用中表现相当出色,其得益于独特的“串并联结构”设计以及滚柱丝杠的双重优势,使得该设备单臂能够承载15千克重量,而双臂协作时则可承载高达30千克,充电一次后能够连续工作长达8小时,充分满足了高强度工业作业的严格要求。
胡德波透露,经过多次升级,开普勒机器人公司研发的人形机器人现已达到第五代,并已开始小规模的生产。
赋能人形机器人,传感器市场潜力加速释放
值得注意的是,在人形机器人的智能化发展过程中,对感知、交互、运动以及控制等多个方面都提出了更高的要求,其中传感器在各个模块中扮演着至关重要的角色。
以K2大黄蜂机器人所配备的力觉灵巧手为证,这种手部装置单手便拥有11个关节的运动自由度,每个指尖配备了25个力触点,再加上具备六个维度的力手腕,这使得它具备了类生物的触觉感知能力和精确的力量控制。无论是轻拿鸡蛋还是拧紧瓶盖,这款机器人都能做到动作稳健,操作精准。
实际上,并非仅有开普勒机器人如此。众多国内人形机器人制造商纷纷选择,在“灵巧手”中集成更多传感器,以此提升其高精度力控能力与多样化动作执行功能。
上海硅步Shadow灵巧手配备了超过100个传感器,其运行频率可达到1KHz,重复定位的精确度可达0.2毫米,具备20个自由度和24种动作;瑞森可freehandy灵巧手运用了多阵列的压力传感器,能够实现触觉和滑觉的精确感知;它拥有6个自由度,能够独立控制每一根手指。
机器人行业专家指出,伴随着人形机器技术的迅猛进步,对周围环境感知能力的要求日益增强。与此同时,与之紧密相连的视觉、听觉、嗅觉、触觉以及力觉传感器市场,将迎来快速发展的机遇。这些市场的潜力也将随之加速释放,从而为国内的优秀传感器企业带来福音。
在当前的实际应用中,机器人能够通过嗅觉传感器来辨别气味,借助力觉传感器获得精确的力感反馈,依靠惯性测量单元进行姿态控制,而电子皮肤等触觉传感器则能感知压力、剪切力以及接触力等多种感觉,从而帮助机器人手部进行更为精细的操作。
当前,公司的柔性电子皮肤产品正与多家生产人形机器人的企业建立合作关系,并且已向若干机器人制造商提供了小规模的产品。肖锋指出,展望未来,公司计划在具身智能这一领域持续深入发展,致力于传感器技术的创新和推广
开普勒机器人宣布,与汉威科技携手合作,此举将推动双方在感知系统和具身智能领域的深厚技术积累得到进一步发挥。通过将高精度传感器技术与自主可控的机器人平台进行深度结合,我们旨在打造出具有商业化应用潜力的下一代人形机器人解决方案。此举将有力推动人形机器人产业迈向规模化应用的新阶段。
刘安琪担任责编,陈筱娟负责审校,李震进行审核,古筝承担监审职责。

 网站首页
网站首页 单位简介
单位简介 新闻动态
新闻动态 四川从业
四川从业 从业商会
从业商会 采购招商
采购招商 信息公开
信息公开 咨询投诉
咨询投诉